Description
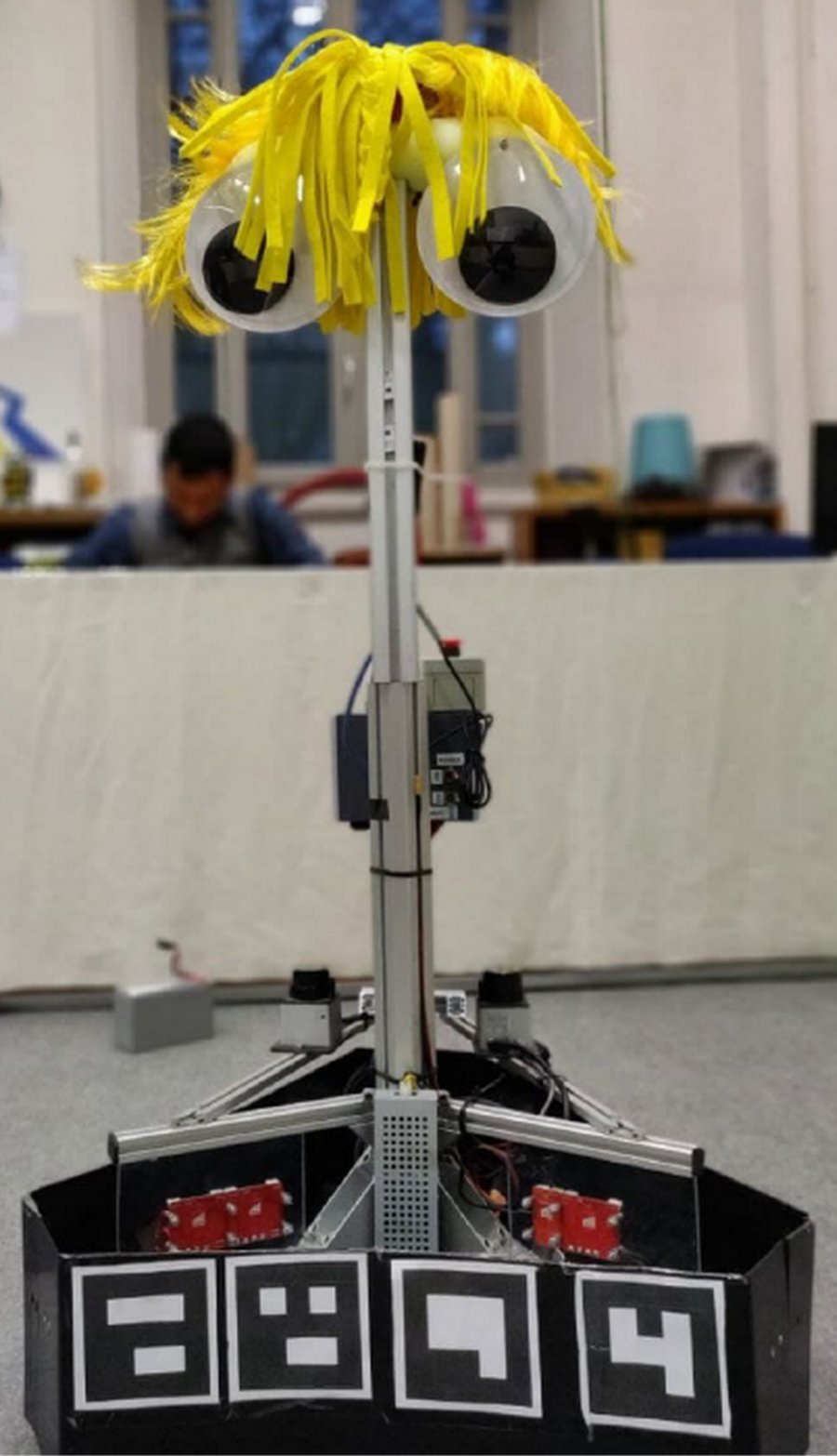
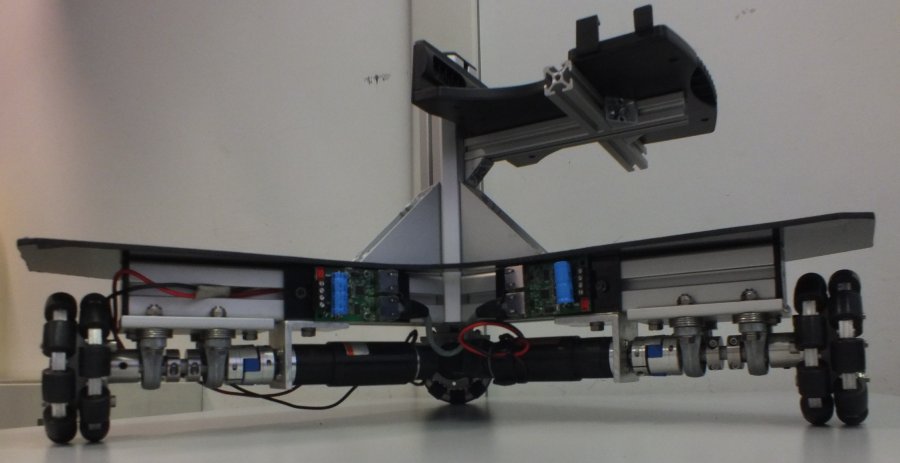
Triskar, implemented in two instances (Triskar1 and Triskar2), is an anholonomic robot basis mounting three omnidirectional wheels, and can run at a speed up to 1.3 m/sec. The control system is based on the R2P architecture, developed at AIRLab and sold by the Nova Robotica spin-off. It can be configured in different ways, including E-2?, a barker robot for malls and exhibitons. It is an evolution of the Triskar robots developed for Robocup.