
Giuseppe Fabio Preziosa, a Ph.D. student in Information Technology at the Department of Electronics, Information and Bioengineering - Politecnico di Milano, was a finalist for the Best Paper Award at the 14th IFAC Symposium on Robotics with the paper “Low Resolution Next Best View for Robot Packing,” co-authored with Chiara Castellano, Marco Faroni, Andrea Maria Zanchettin, and Paolo Rocco. The symposium took place in Paris alongside the 14th IFAC Symposium on Mechatronics and was attended by more than 300 participants.
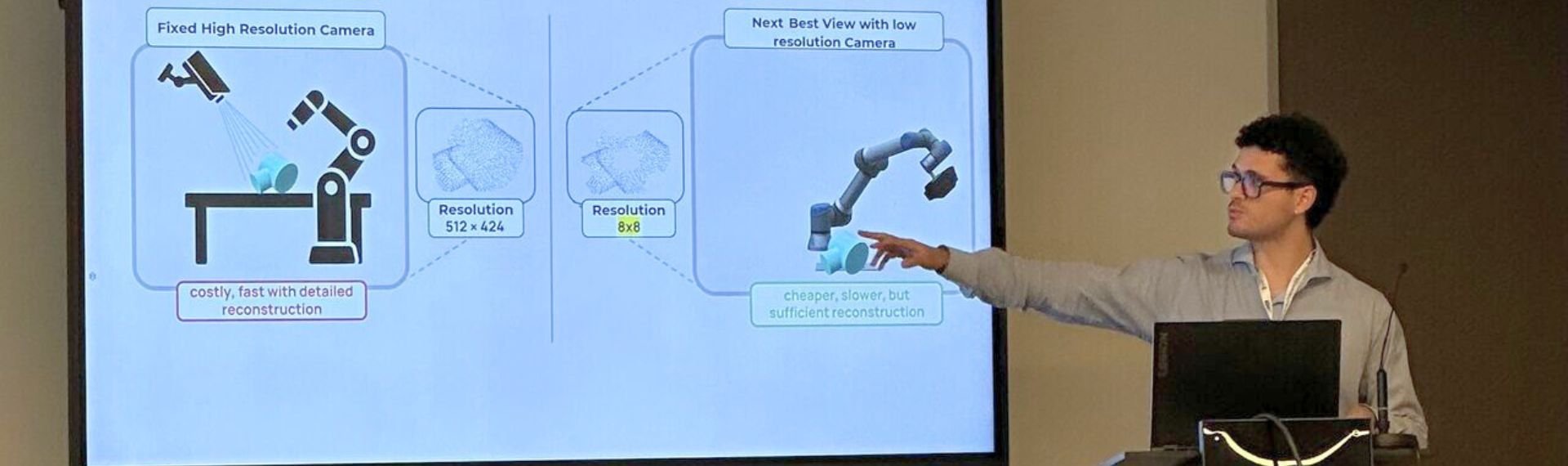
The finalist paper addresses the challenge of active perception in low-cost scenarios by proposing a fast and scalable Next Best View algorithm, tailored for very low-resolution sensors, ideal for scalable robotic packing configurations. The approach introduces a dedicated utility function and leverages a sampling-based RRT strategy to efficiently explore the observation space.
The work was carried out as part of a collaboration with Camozzi Research Center.