Supervisory control for intersection collision avoidance using scheduling
Heejin Ahn
PhD Candidate Massachusetts Institute of Technology
DEIB - PT1 Room
June 10th, 2016
2.00 pm
Contact:
Alessandro Colombo
Research Line:
Dynamics of complex systems
PhD Candidate Massachusetts Institute of Technology
DEIB - PT1 Room
June 10th, 2016
2.00 pm
Contact:
Alessandro Colombo
Research Line:
Dynamics of complex systems
Abstract
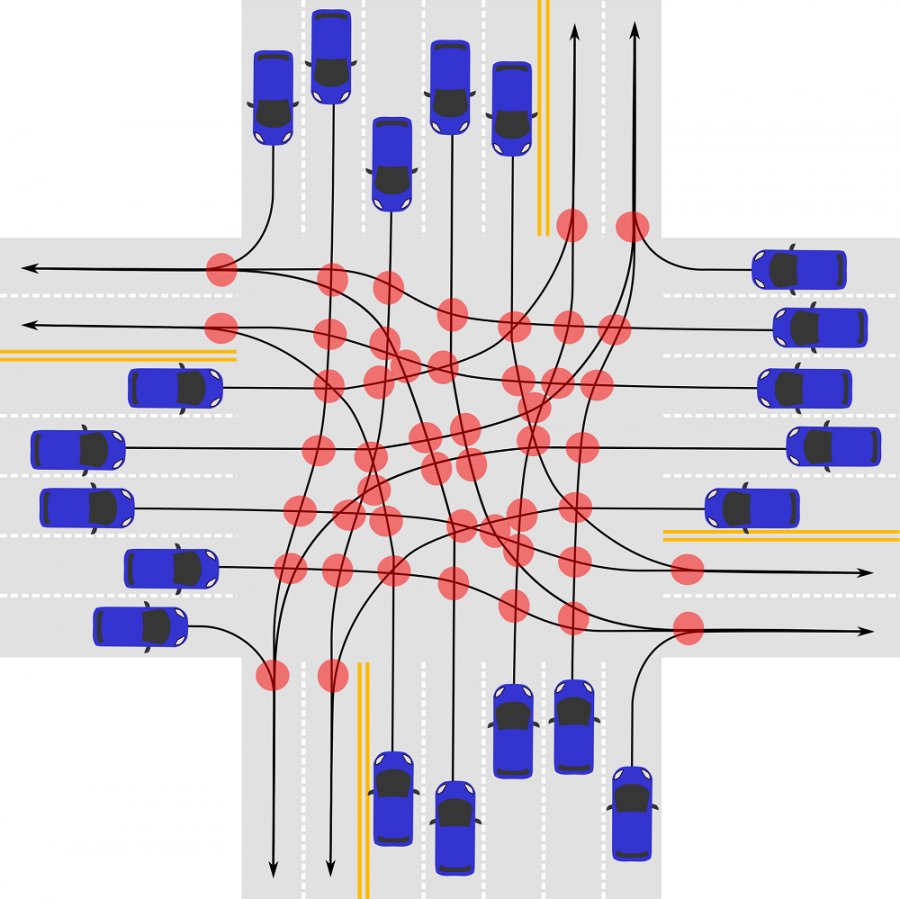
In this talk, I will present the design of supervisory controllers to prevent vehicle collisions at intersections. An intersection is modeled as an area containing multiple conflict points where vehicle paths cross in the future. At every time step, the supervisor determines whether there will be more than one vehicle in the vicinity of a conflict point at the same time. If there is, then an impending collision is detected, and the supervisor overrides the drivers to avoid collision.
A major challenge in the design of supervisory controllers as opposed to autonomous vehicle controllers is to verify whether future collisions will occur based on the current drivers choices. This verification problem is particularly hard due to the large number of vehicles often involved in intersection collision, to the multitude of conflict points, and to the vehicles dynamics. In order to solve the verification problem, we translate the problem to a job-shop scheduling problem that yields equivalent answers. The job-shop scheduling problem can, in turn, be transformed into mixed-integer linear program when the vehicle dynamics are first-order dynamics or when a restricted set of input signals is considered with general vehicle dynamics.
These MILP problems can thus be solved by using a commercial solver.
A major challenge in the design of supervisory controllers as opposed to autonomous vehicle controllers is to verify whether future collisions will occur based on the current drivers choices. This verification problem is particularly hard due to the large number of vehicles often involved in intersection collision, to the multitude of conflict points, and to the vehicles dynamics. In order to solve the verification problem, we translate the problem to a job-shop scheduling problem that yields equivalent answers. The job-shop scheduling problem can, in turn, be transformed into mixed-integer linear program when the vehicle dynamics are first-order dynamics or when a restricted set of input signals is considered with general vehicle dynamics.
These MILP problems can thus be solved by using a commercial solver.
